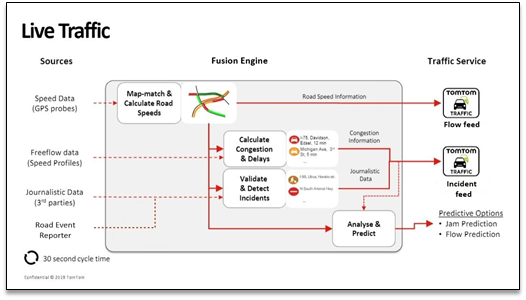
The events created in Road Event Reporter and sent to TomTom are combined in the TomTom Fusion Engine with data from other sources. The fusion engine calculates speeds and delays and validates reported incidents with the actual traffic flows.
The fusion engine is a fully automated process that contains checks and balances that might change or ignore specific events input via the Road Event Reporter. These checks help improve the information that is sent to the road user.
For example, when a road closure is reported in the Road Event Reporter but the fusion engine detects GPS probes driving through the road closure then the fusion engine may ignore the event. The result is that the event is visible in the Road Event Reporter interface but does not appear in TomTom’s real-time traffic service output.
Traffic data is distributed to users connected to the TomTom Traffic service, both in-car and online.
